导数的应用
极值
绝对极值(最值)(最大、最小)
相对极值(局部)(→f′(c)=0)
临界点(⇔f′(c)=0或f(c)=0)
极值相关定理
-
定理 1 连续函数的极值定理
对于在闭区间 I 上的连续函数 f(x) ,在某些点处能取到最大值 M 和最小值 m ,那么对于 I 中的所有 x ,都有 m≤f(x)≤M。
(废话)
-
定理 2
在函数f的定义域内点c处取到局部最大值或局部最小值,点c也存在导数,那么f′(c)=0。
微分中值定理
-
定理 1 罗尔定理
定义在[a,b]的连续可微函数f(x),如果
f(a)=f(b)=0
那么至少有一个数c使得f′(c)=0
-
定理 2 微分中值定理
定义在[a,b]上的连续可微函数f(x),那么(a,b)内存在一点 c,使得
b−af(b)−f(a)=f′(c)
我们可以看到,罗尔定理其实是微分中值定理的特殊情况。
图形的形状
增减函数检验
- 定义检验
- 一阶导数正负检验
局部极值的检验
一阶导:
- 局部极小值,f′(x)从负变正
- 局部极大值,f′(x)从正变负
- 没有局部极值,f′(x)两边同号
二阶导:
- f′(c)=0 且 f′′(c)>0,那么f在x=c处取得极小值
- f′(c)=0 且 f′′(c)<0,那么f在x=c处取得极大值
凹性
- 凹向上,y′′>0
- 凹向下,y′′<0
拐点
凹性改变的点,叫做拐点。
二阶导函数等于零,且一阶导函数有极大值或极小值的点是拐点。
但二阶导数等于零也不一定是拐点,二阶导数不存在也可能是拐点。
自治微分方程的图形解
导数只是关于 y 的函数,我们称该方程为自治微分方程。
使自治微分方程dxdy=g(y)等于零的 y 值,称之为平衡点或静止点。
是一条用来表示函数的高阶导数的正负性的数轴。
借助相直线,我们可以得到自洽微分方程的图形解(没有表达式,但知道解的函数大致图像)。
三个案例
冷却
假设环境摄氏温度为P,汤的温度为H,经过的时间为t,我们还假设环境足够大,使得汤的温度对环境的影响忽略不计。根据牛顿的冷却定律有:
dtdH=−k(H−P)
当H>P时,dtdH<0。
经过求导之后,画出相直线。
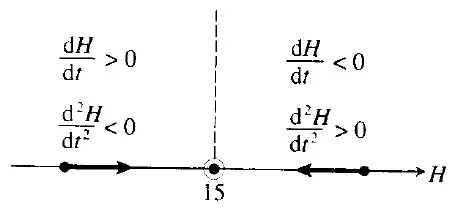
微分方程的图形解如图:
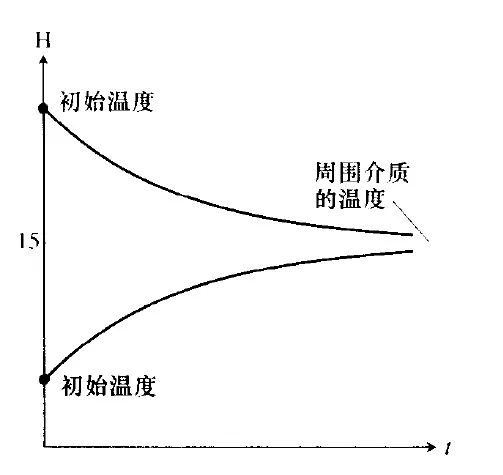
图中的 15 是一个稳定的平衡点,上下的两条直线都稳定朝 15 靠近。
分析有阻力时的落体
按照动量定理,我们有:
F=dtd(mv)=mdtdv+vdtdm=mdtdv
当物体在介质中下落时,往往会受到阻力,阻力往往与速度相关,这时得到的公式为:
F=Fg−Fv=m(g−kv),a=g−mkv.
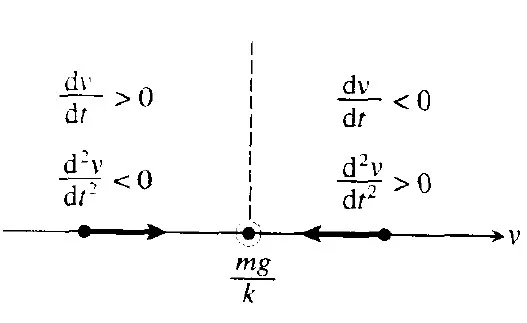
当物体受到的合力F=0时,速度便稳定下来,故稳定速度为v=kmg
我们考察速度的变化过程:
dt2d2v=dtd(g−mkv)=−mkdtdv
画出相直线:
画出图形解:

阻力图形解
logistic 增长
假设P=P(t)为某个种群的数目,在时间Δt内,种群的增长率为k,则种群数目为:
ΔtΔP=kP(t)
k>0是种群的增长率,对增长率进行假设:在自然界中,由于有限的资源,我们通常会假设一个极限种群或承载容量M,资源变得短缺了,种族的增长率k便会降低,
k=r(M−P)
r代表了增长率变化的速度,对k进行代换得到:
dtdP=r(M−P)P=rMP−rP2
该模型称之为logistic 增长模型。
考察该模型的函数性态,我们对上述模型两边求导:
dt2d2P=rMdtdP−2rPdtdP=rdtdP(M−2P)
画出相直线得:

logistic 增长相直线
画出图形解:
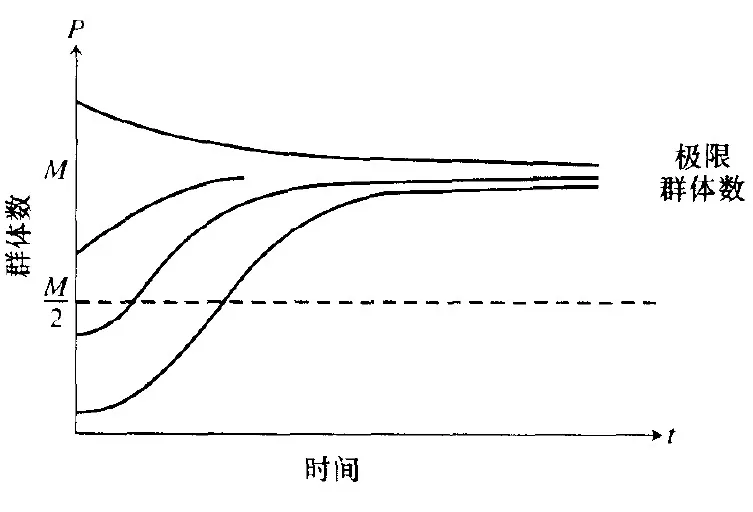
logistic 增长图形解
我们可以看到,拐点在2M位置处。
建模和最优化
- 求解最大-最小问题
- 了解问题
- 研制一个该问题的数学模型
- 求该函数的定义域
- 识别临界点和端点
- 求解该数学模型
- 对解进行解释
书中使用了 Fermat 原理和 Snell 定律来进行建模举例。
Fermat 原理:光在介质中传播永远以时间最短的路径传播。
Snell 定律:在介质之间相互传播的时候,入射角和折射角满足一定的关系:
c1sinθ1=c2sinθ2
线性化和微分
如果f在x=a可微,那么近似函数
L(x)=f(a)+f′(a)(x−a)
就是f在a的线性化
近似f(x)≈L(x)是f在a的标准线性近似,点a就是线性中心。
设y=f(x)是一个可微函数,微分dx是一个自变量。微分dy是
dy=f′(x)dx
变量dy永远是一个因变量,它既依赖于x,又依赖dx.
-
根式函数和幂函数的线性化
(1+x)k≈1+kx
-
在x=0附近常用线性化
sinx≈x, cosx=1, tanx≈x
-
绝对变化
- 估计变化
Δf=f(a+dx)−f(a)
- 实际变化
df=f′(a)dx
-
相对变化
- 估计的变化
f(a)df
- 实际变化
f(a)Δf
变化的敏感度
由df=f′(x)dx,我们知道f′(x)可以衡量f对dx的敏感程度。(这一点可能在多变量的情形下起作用)
微分变化估计实际变化的误差
Δf−df=f(a+Δx)−f(a)−f′(a)Δx=Δx(Δxf(a+Δx)−f(a)−f′(a))
令 Δxf(a+Δx)−f(a)−f′(a)=ϵ,
则上式 =Δxϵ
当 Δx→0 时,ϵ→0.
Newton 法
本节介绍一个求解根的方法:牛顿(Newton)法
通过切线的零点,确定下一条切线,再根据下一条切线的零点,确定再下一条切线…如此循环往复,最后得到要找的根。如下图:
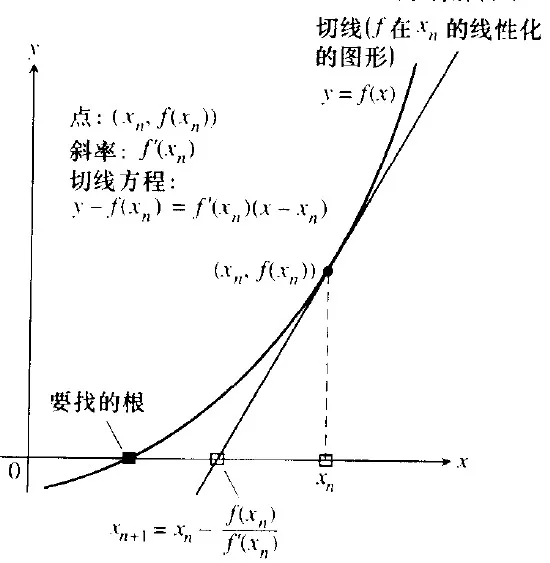
Newton 法
由线性化可知,牛顿法代数上计算就是根据给定的x0求得f(x0)和f′(x0)再代入:
x=xn−f′(xn)f(xn)
然后循环以上步骤,直至xn收敛于某个固定的值(也可能不收敛,此时f(x)无零点。
Newton 法失效的情况:
- 当f′(xn)=0时,Newton 法就会停下来,这时便需要选择别的起点;
- Newton 法有时会陷入无限循环,无法收敛。
求得的根不是想要的根的情况:

Newton 法不是想要的根
我们使用 Newton 法解 z6−1=0,我们根据不同的起始点,经过多次迭代之后得到如图:

这一个个盆形区域被称为分形盆,这六个分形盆他们分别导向这个复数方程的六个解1,−1,±3/2,±1/2